单回路控制系统
概述
- 对于一个过程参数,采用一个控制器和与之配套的检测元件和变送器都只有一个
- 只有一个输入信号和一个输出信号的简单系统
- 应用广泛,只有在单回路控制系统不能满足生产过程控制要求时,才会考虑其他复杂控制系统
基本结构

- 抽象的结构包含调节器(控制器)、调节阀(执行器)、被控过程、检测变送器(在反馈通路上)
系统设计的基本内容
- 方案设计
- 工程设计
- 工程安装和仪表调校
- 调节器参数整定
被控参数的选择
- 直接参数:能直接反映生产过程产品产量和质量以及安全运行的参数
- 间接参数:当选择直接参数有困难(缺少获取质量信息的仪表、或滞后量太大),无法满足控制质量要求时使用
操纵变量的选择原则
- 应是工艺上允许加以控制的可控变量
- 应是对被控变量有影响的众多因素中比较灵敏的变量,控制通道的放大系数要大一些,时间常数要小一些,纯滞后时间尽量小
- 还应考虑工艺的合理性、经济性
控制参数的选择
- 分析过程扰动通道特性与控制通道特性对控制质量的影响,以被控对象特性参数对控制质量的影响为依据,正确选择可控性良好的变量作为控制参数
过程静态特性对控制质量的影响
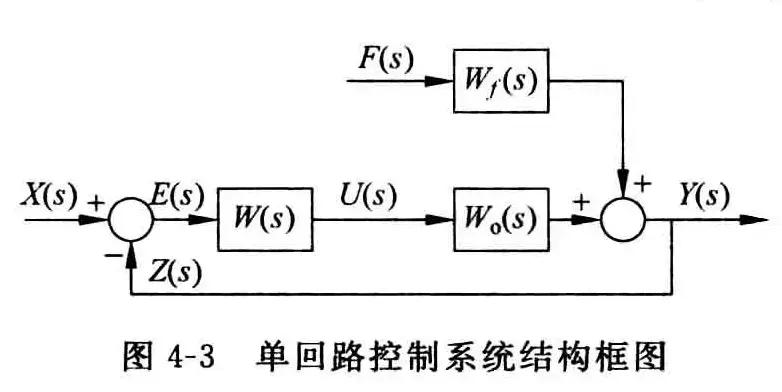
- 调节器是比例环节,控制通道和扰动通道都是惯性环节:$$\large \begin{matrix} W(s)=K_c \ W_o(s)=\frac{K_o}{T_os+1} \ W_f(s)=\frac{K_f}{T_fs+1} \end{matrix}$$
- 定义
,则扰动情况下系统的偏差是 ,则在单位阶跃扰动下系统的余差可以用终值定理求 - 结论:扰动通道的静态放大系数
越大,系统余差越大,为了提高系统控制精度,应该使 尽量小
过程动态特性对控制质量的影响
- 时间常数
的影响 - 设各环节放大系数为 1,干扰通道为一阶惯性环节,则其传函为一阶滤波器,截止频率
- 时间常数
越大,滤波能力越强,扰动 对被控参数 的影响越小
- 设各环节放大系数为 1,干扰通道为一阶惯性环节,则其传函为一阶滤波器,截止频率
- 滞后时间
的影响 - 扰动通道存在纯滞后
时:理论上不会影响系统的控制质量,仅仅是将整个过渡过程 迟后了 - 当扰动通道存在容量滞后时间时,将使干扰信号变得平缓一些,对于克服扰动有利
- 扰动通道存在纯滞后
- 扰动作用点位置的影响
- 对多个扰动的系统,扰动距离被控参数
越近,对 影响越大,因此需要使得扰动作用点位置原理被控参数
- 对多个扰动的系统,扰动距离被控参数
总结:干扰通道和控制通道参数的选择原则
- 放大倍数
:干扰通道上越小越好,控制通道上尽可能大 - 时间常数
:干扰通道上越大越好,控制通道上尽可能小,多个对象时要注意错开,减小中间和小的时间常数 - 纯滞后
:干扰通道上延迟了干扰的影响,控制通道上越小越好
调节阀(执行器)的选择
- 可分为气动、电动、液动三大类,常用气动
气动调节阀的类型
- 气开阀:开度随着信号压力的增大而增大,无信号时处于全关状态
- 气关阀:随着信号压力的增加,阀逐渐关闭,无信号时处于全开状态
气开与气关的选择原则
- 基于安全上的需要,如果事故发生时:
- 调节阀关上更安全,则选择气开阀(事故关)
- 打开更安全,则选择气关阀(事故开)
- 可见气动阀的开关跟事故的开关是相反的,因为事故发生时需要切断信号
- 举例:
- 加热炉燃料油、燃料气调节阀、过热蒸汽等高温易引起爆炸的,应使用气开式
- 液氨、冷凝回流、冷蒸汽等选择气关式
- 题目特别说明产品容易冷结晶时,热蒸汽输入阀门选择气关阀,冷凝回流选择气关式,即都选择气关阀(事故开)
执行机构正、反作用的确定
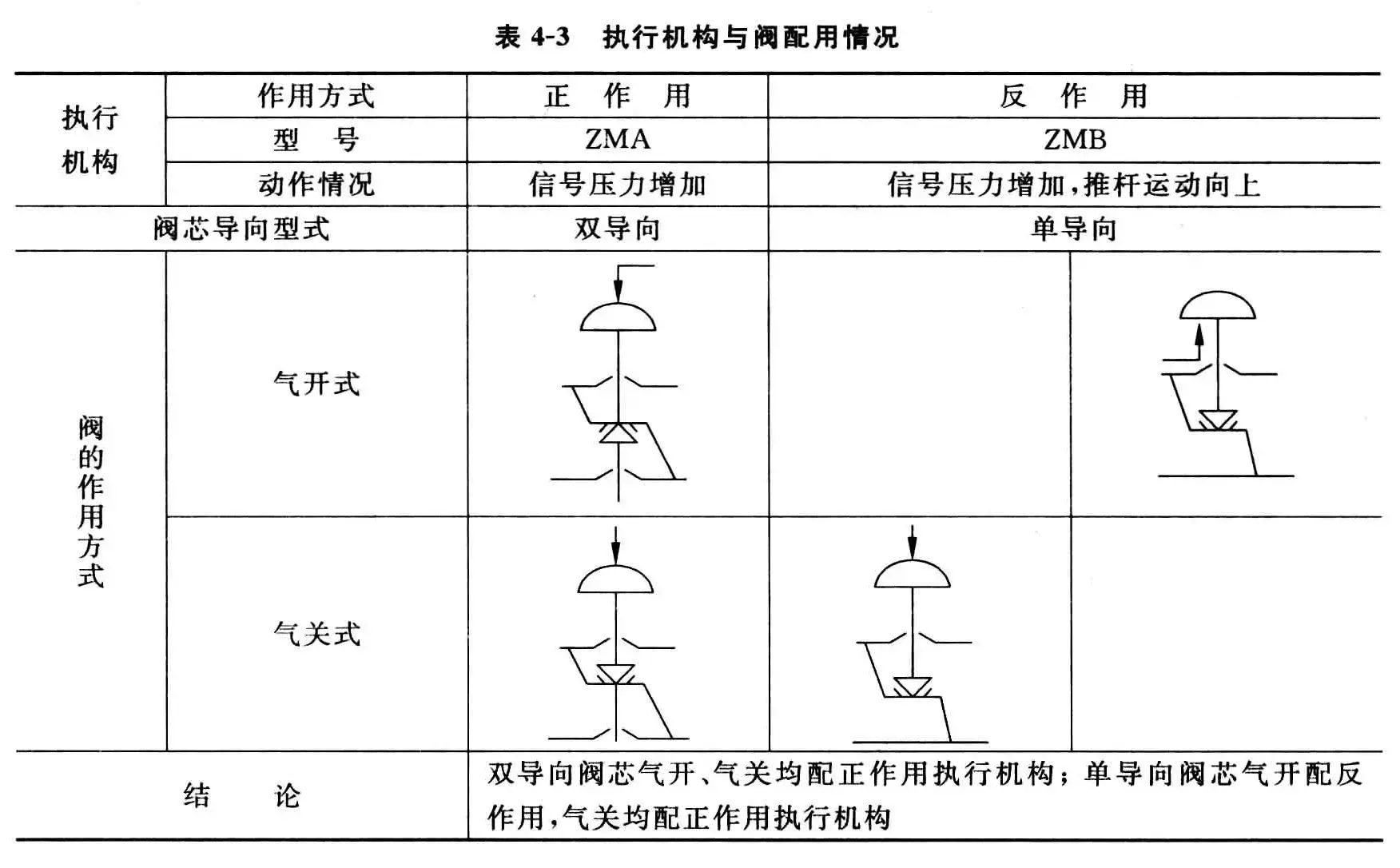
- 第二列的图其实属于正作用
- 正作用:压力增大时,推杆下移(半圆下移)
- 反作用:压力增大,推杆上移
- 气开阀有正有负,气关阀只有正作用
调节阀流量特性的选择
- 流量特性指介质流过调节阀的相对量与相对开度的关系:$$\frac{q_v}{q_{vmax}}\approx f(\frac{l}{L})$$
- 左边为相对流量,右边的
为相对开度,即调节阀某一开度和全行程之比
- 左边为相对流量,右边的
- 通过调节阀的流量不仅与开度有关,还与阀门前后压差有关,为了方便分析比较,假定阀门前后压差固定再讨论
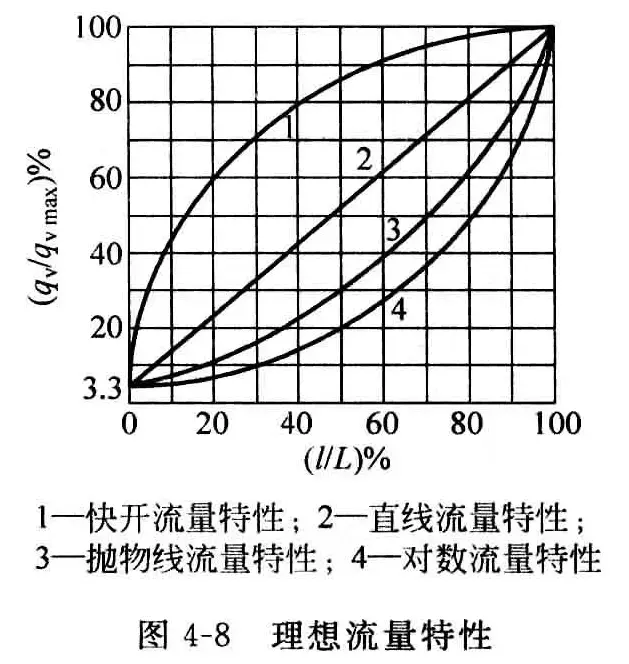
- 理想流量特性:调节阀在前后压差不变时得到的流量特性
- 直线特性:调节阀相对开度变化引起的相对流量变化是常数,是可分离变量的微分方程,可以解出一阶函数
- 对数(百分比)流量特性:相对开度变化所引起的相对流量的变化,与相对流量成正比
- 抛物线流量特性:相对流量与相对开度成平方关系,通常可用对数流量特性代替
- 快开流量特性:在开度很小时,流量就比较大;随着开度的增大,流量很快就达到最大,故称为快开
控制器的选择
- 工业常用控制规律:P、PI、PID
积分控制对控制质量的影响
- 积分控制能消除余差,但是降低了系统的稳定性
- 控制器在参数整定时,当引入积分环节后,应当适当把
减小,以补偿积分作用造成的稳定性下降
根据过程特性选择调节器控制律
- 比例控制(P)
- 较快克服扰动的影响,使系统稳定下来,但是存在余差
- 适用于控制通道滞后较小,负荷变化不大,控制要求不高,被控参数允许在一定范围内变化的场合
- 例如:储槽液位控制、压缩机储气罐压力控制等
- 比例-积分控制(PI)
- 工程应用最广泛,积分能消除余差
- 适用于控制通道滞后较小,负荷变化不大,被控参数不允许有余差的场合
- 比例-微分-积分控制(PID)
- 最理想的控制律,在比例的基础上引入积分,可以消除余差,又引入了微分作用,提高系统的稳定性
- 适用于控制通道时间常数较大,控制要求较高的场合
- 并非选择了 PID 控制就一定能达到最好的效果,随意选择会给其他工作带来复杂性,并带来困难(比如参数整定)
确定调节器的正、反作用
- 调节器正反作用的选择同被控过程的特性以及调节阀的气开、气关形式有关
- 被控过程的正、反作用
- 正作用:被控过程的输入量变大时,其输入也随之增大(同增减)
- 反作用:被控过程输入量增加,其输出却减小
- 过程控制系统要能正常工作,则组成系统的各个环节的极性(可用静态放大系数表示)相乘必须是正数
- 检测变送器的静态放大系数通常为正极性,故只需调节器
、调节阀 、过程的 极性相乘为正即可 - 可规定各个环节静态放大系数的极性:
- 调节器
:正作用时取负数,反作用时取正数 - 调节阀
:气开式取正,气关式取负 - 过程的
:正作用取正,反作用取负
- 调节器
- 检测变送器的静态放大系数通常为正极性,故只需调节器
- 确定调节器正反作用的方法:
- 首先根据安全原则确定调节阀的气开、气关形式
- 然后按照被控特性,确定其正反作用
- 最后将各环节的静态放大系数极性相乘,结果是正数,则调节器
极性为正,否则要添负号,使得系统能正常工作
控制器参数整定
经验凑试法
- 又称现场凑试法,根据经验先将控制器参数设定为某一数值,并在闭环控制系统中通过改变设定值施加扰动,观察过渡过程曲线形状,不断调整比例系数、积分环节和微分环节的时间常数,直到获得满意的控制质量
- 常用的过程控制系统 PID 控制器参数经验范围:
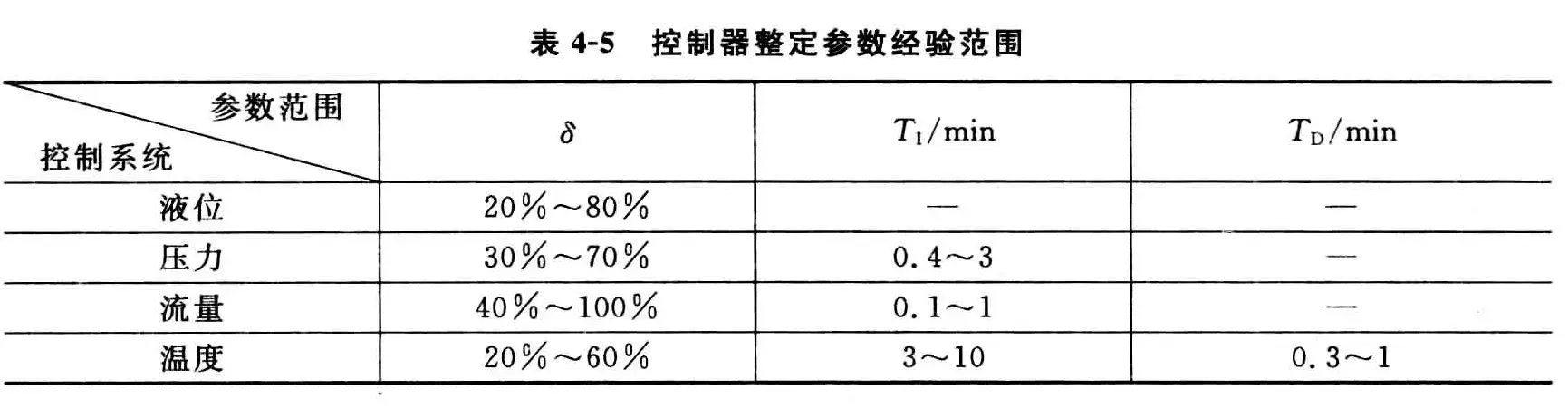
- 可见,液位通常使用 P 控制;压力和流量用 PI 控制;温度用 PID 控制
- 具体步骤
- P 控制器:先将比例度
(就是比例系数的倒数)放在较大位置,逐步减小,观察过渡过程,直到得到满意的曲线 - PI 控制器:先按纯比例作用整定比例度,达到
衰减过程曲线为止;随后将比例度放大 ,加入积分环节并不断增大 ,直到获得 衰减过程曲线 - PID 控制器:先令
,按照 PI 控制方法整定 ;再将比例度减小 ,适当减小 后,加入微分环节并不断增大 ,直到获得满意的曲线
- P 控制器:先将比例度
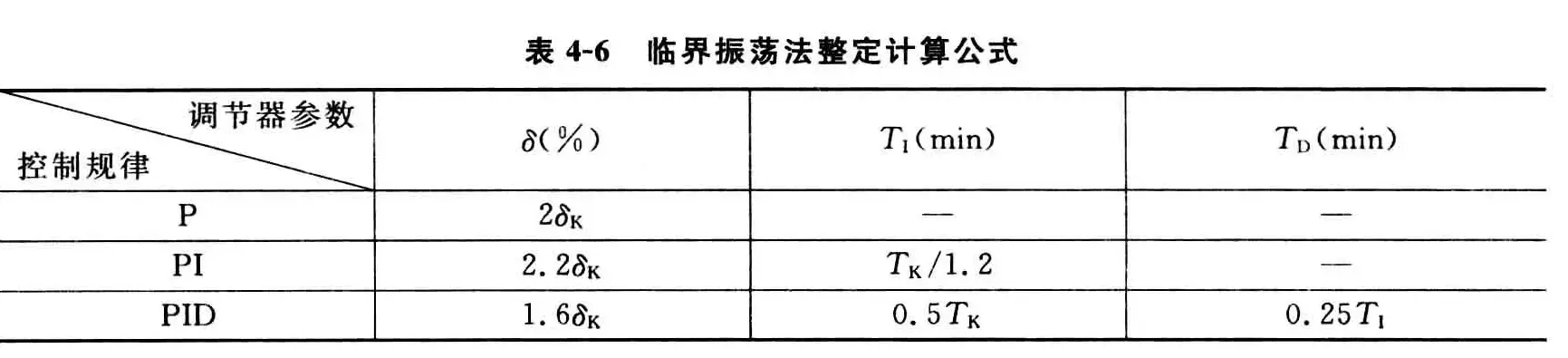
临界比例度法(没考过)
- 在纯比例运行下通过试验,调整比例度得到等幅振荡曲线后,就得到临界比例度
和临界周期 ,再根据经验总结出的关系式求出控制器各个参数的值 - 这种方法比较简单、易于掌握和判断,适用于一般的控制系统,不适用于临界比例度小、不允许产生振荡的系统
- 经验公式:
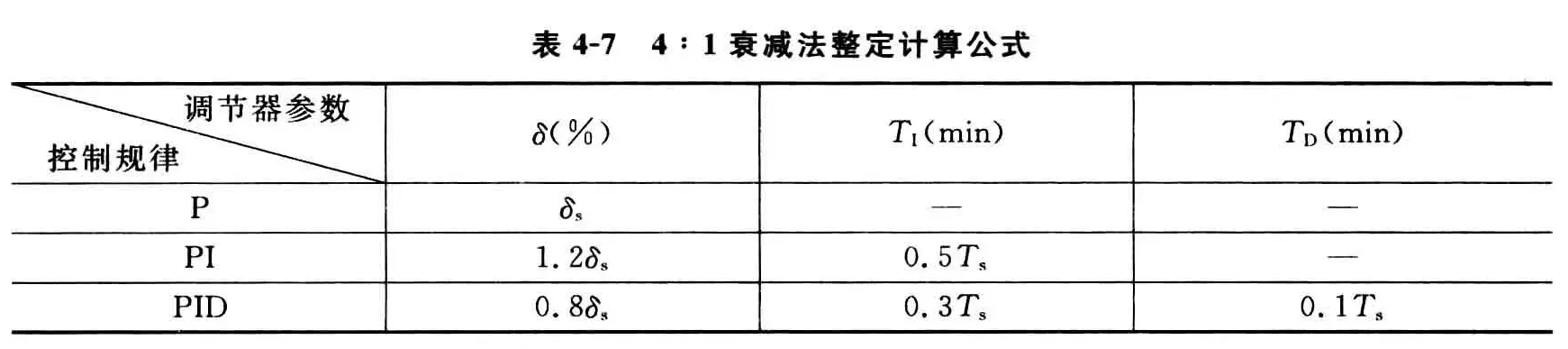
衰减曲线法(没考过)
- 在纯比例运行下通过试验,调整比例度得到衰减振荡曲线后,就得到衰减比例度
(衰减率公式)和临界周期 (或上升时间 ),再根据经验总结出的关系式求出控制器各个参数的值 - 这种方法比较简便,整定质量高,过程安全可靠,应用广泛,但是对干扰频繁、记录曲线不规则的系统难以应用
- 经验公式:
响应曲线法(没考过)
- 已知对象特性时可用
- 整定步骤:
- 测定广义对象的响应曲线,得纯滞后时间
和时间常数 ,如下图: 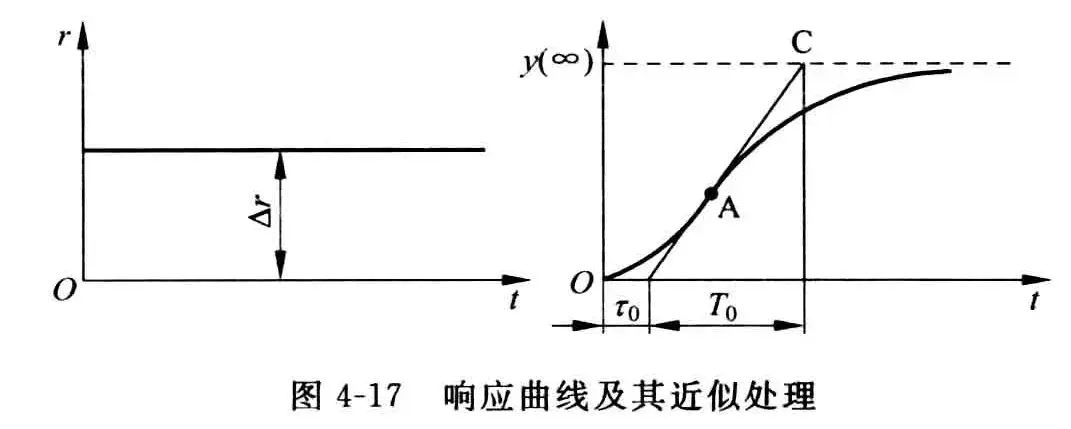
- 图中 A 为曲线拐点
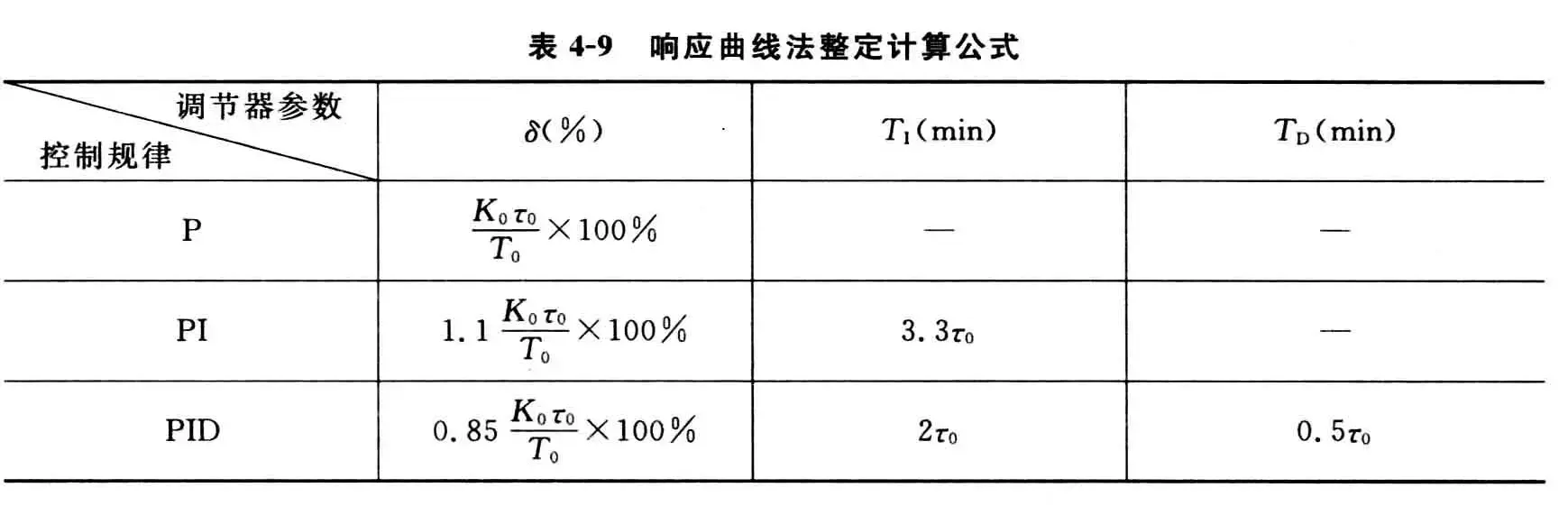
- 计算广义对象放大系数:$$\large K_0=\frac{\Delta y}{y_{max}-y_{min}}/\frac{\Delta P}{P_{max}-P_{min}} $$
表示被控量测量值, 表示控制器输出
- 由经验公式得到参数
- 测定广义对象的响应曲线,得纯滞后时间