串级控制系统
概念
- 串级控制系统:两台控制器串联在一起控制一个控制阀
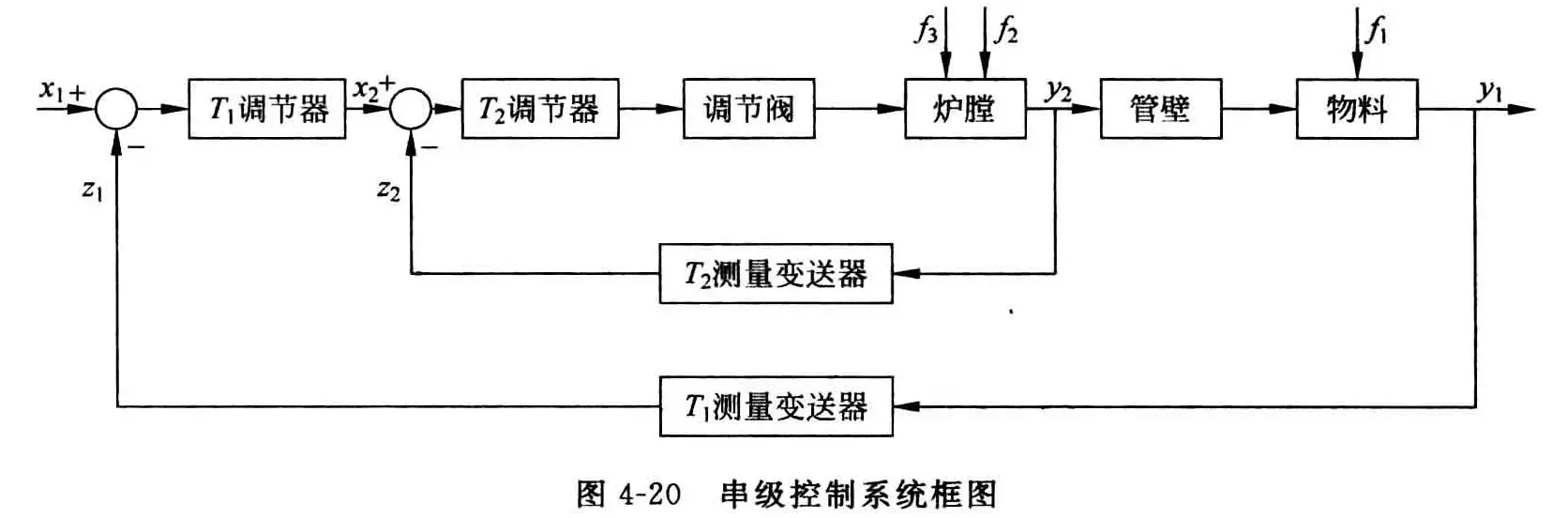
- 这张图的形状要记下来
串级控制系统的组成
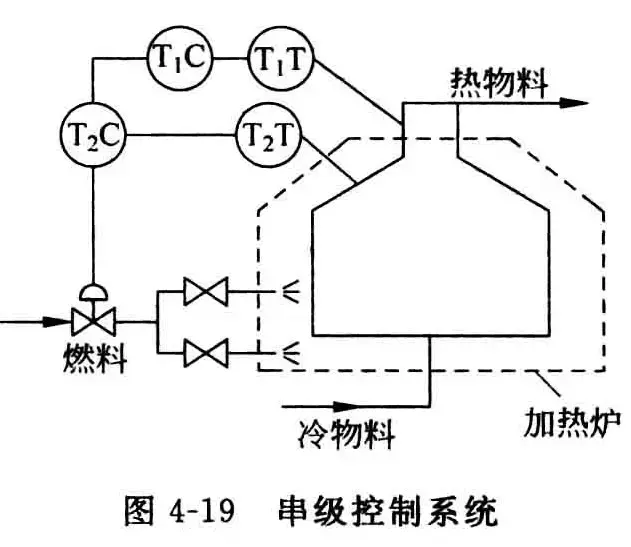
- 主被控参数(主变量):起到主导作用的、关系到产品质量或安全的被控量,示例中为炉出口温度
- 副被控参数(副变量):为了稳定主变量,或因某种需要而引入的辅助变量,示例中为炉膛温度
- 主控制器:按设定值与主变量的测量值的偏差进行工作的控制器,其输出为副控制器的设定值
- 副控制器:按由主控制器输出的设定值与副变量的测量值的偏差进行工作的控制器,其输出直接控制调节阀
- 主被控过程(主对象):主变量所处的工艺设备,输入信号为副变量,输出为主变量
- 副被控过程(副对象):副变量所处的工艺设备,输入信号为控制参数,输出为副变量
- 主回路:由主控制器、副控制器、控制阀、副被控过程、主被控过程、主被控过程参数变送器构成的闭合回路(大闭环)
- 副回路:由副控制器、控制阀、副被控过程、副被控过程参数变送器构成的闭合回路(小闭环)
- 一次扰动:不在副回路内的扰动,示例中是被加热物料的变化
- 二次扰动:在副回路内的扰动,示例中是炉膛方面的扰动
以及烟囱抽力变化 - 副控制器具有“粗调”的作用,主控制器具有“细调”的作用,两者配合,控制质量优于单回路控制系统
- 主、副被控参数可以是相同或不同的物理参数,比较灵活
串级控制系统的特点
- 结构上是一个双闭环控制系统
- 改善了被控过程的动态特性:控制作用更加及时,响应速度更快,控制质量得到提高
- 提高了系统的工作频率
- 具有较强的抗干扰能力:副回路对进入其中的干扰具有超前控制效果,减少了干扰对主变量的影响(一般将比较剧烈的干扰放在副过程中)
- 具有一定的适应能力:主回路是一个定值控制系统,而副回路是随动系统
- 适用:对象的滞后和时间常数较大、干扰作用强且频繁、负荷变化大、对控制质量要求较高
系统设计
主回路设计
- 主回路的选择就是确定主被控参数:
- 直接或间接反映生产过程质量或安全性能的参数作为主变量
- 允许主变量有一定的滞后
- 主变量必须有足够的变化灵敏度
副回路设计
- 副回路应该包括尽可能多的干扰(主要原则)
- 副回路具有速度动作快、抗干扰能力强的特点(艰巨的任务都交给副回路)
- 特别是变化最剧烈、幅值最大、最频繁的主要干扰
- 主、副过程的时间常数应匹配
- 副过程时间常数比主过程小得多时,副回路反映灵敏,控制作用快;但此时副回路包含的扰动少,对过程的改善也就减少了
- 如果大于或者接近的话,副回路对改善过程特性效果显著;但是副回路反应变迟钝,不能够有效克服扰动,将明显影响主过程
- 当主、副过程的时间常数比较接近时,会发生“共振”现象
- 要考虑工艺上的合理性和实现的可能性,以及生产的经济性
主、副调节器控制律的选择
- 主调节器应选择 PI 或 PID 控制律
- 主变量的控制质量要求通常很高,一般要求无余差
- 副调节器选择 P 控制律即可
- 副变量允许有余差
- 一般不引入积分控制,会延长控制过程,减弱副回路的快速性
- 也不引入微分控制,因为副回路本身要快速作用,加入微分规律会使得调节阀动作幅度过大,对控制不利
主、副调节器的正、反作用方式的确定(重点)
- 首先根据工艺生产安全原则选择调节阀的气开、气关形式
- 然后根据副对象特性和调节器形式确定副调节器的正、反作用方式
- 最后根据主对象特性,确定主调节器的正、反作用方式
要点
- 和单回路的正反作用确定联系起来
- 主通道各环节放大系数的极性乘积必须是正值
- 这样才能使整个控制系统构成负反馈系统
调节器参数的整定
两步整定法
- 确定副调节器参数
- 将主调节器比例度置为 100% ,用单回路的衰减曲线法整定(如规定衰减比
),求得副调节器的比例度 和操作周期
- 将主调节器比例度置为 100% ,用单回路的衰减曲线法整定(如规定衰减比
- 把整定完毕的副控制器视作串级控制系统的一个环节,对主控制器参数进行整定
- 将副回路作为主回路的一个环节,用同样的方法求得主调节器的比例度
和操作周期
- 将副回路作为主回路的一个环节,用同样的方法求得主调节器的比例度
一步整定法(没考过)
- 根据经验先将副调节器一次设定好,不再变动,然后按单回路系统的整定方法整定主调节器的参数
- 第一步,查表定副调节器

- 用衰减曲线法(
)整定主调节器
- 第一步,查表定副调节器