串联PID校正
基本控制规律
- 一般认为校正装置的输入为系统的误差 E(s),输出为 U(s)。

比例(P)控制
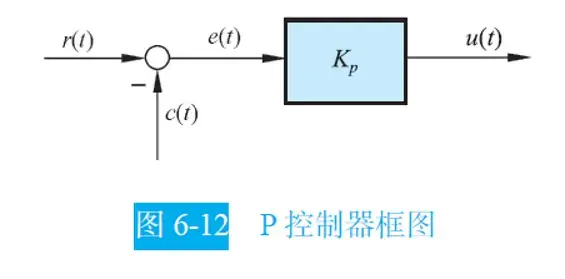
- P 控制器
,其中 为控制器增益,为常数,通常大于1 - 实质上是一个比例环节,通常由增益可调的放大器组成
- 效果:
- 只影响信号增益,不影响相位
- 提高系统开环增益,减小稳态误差,提高系统的控制精度
- 但同时降低了系统的相对稳定性,甚至可能造成闭环系统不稳定(实际应用中很少单独用 P 控制)
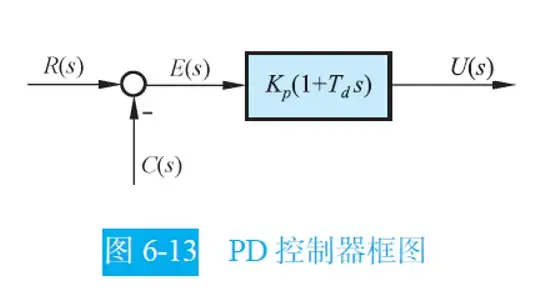
比例-微分(PD)控制
这部分考的多,应注意
-
输入输出关系:
,其中 和 都是可调参数
-
效果:
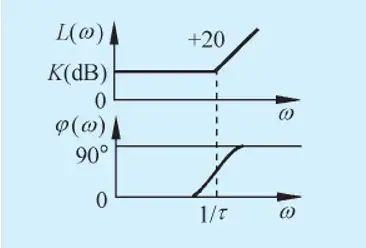
- 反映输入信号的变化趋势(时域求导),产生有效的早期修正信号,增加系统阻尼程度,从而改善系统稳定性
- 使增加一个位于负实轴上的开环零点,从根轨迹角度上看,可将根轨迹向左侧吸引,增加系统相对稳定性
- 增加的零点对应控制器相角超前,可使系统相角裕度提高,改善系统动态性能
- 增加高频段幅值,抗干扰能力减弱
-
与其他校正方法的关系:可以看作串联超前校正的特例
-
微分控制只对动态过程起作用,对稳态过程无影响,而且对噪声非常敏感,不适合单独作为控制器使用
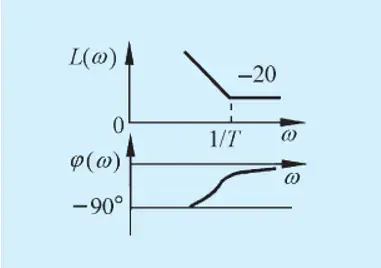
积分(I)控制
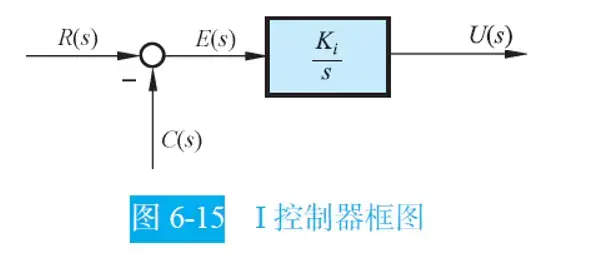
- 输入-输出关系:
- 效果:
- 积分具有记忆功能,输出是输入的积分,当输入信号消失后,输出信号可能是一个非零常量
- 提高系统型别,提高系统稳态性能
- 增加了一个位于原点的开环零点,使得信号产生 90°的相角滞后,对于系统的稳定性不利
- 一般不单独使用 I 控制器
比例-积分(PI)控制
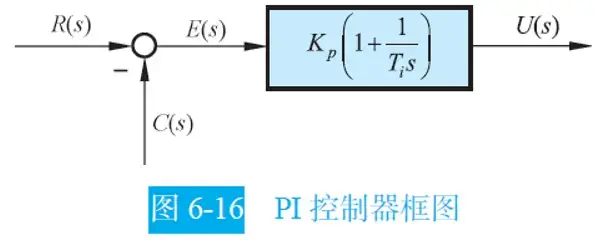
- 输入-输出关系:
- 效果:
- 增加一个位于原点的开环极点,是信号产生 90°的相角滞后,于系统稳定性不利(I 控制)
- 提高系统型别,提高系统稳态性能(I 控制)
- 增加一个位于左半平面的开环零点,减小系统阻尼程度,缓和 PI 控制器极点对系统稳定性及动态过程产生的不利影响
- 压低高频段,提高系统抗干扰能力(低通滤波器)
- PI 控制器主要用于改善稳态性能
- 与其他校正方法间的联系:可以看作串联迟后校正的特例
比例-微分-积分(PID)控制
这部分考的多,应注意
- 输入-输出关系:
- 传递函数:
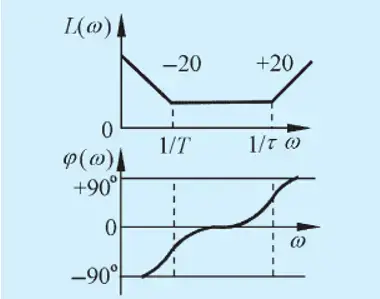
- 效果:
- 利用 P 调节器提高系统开环增益,改善系统快速性和减小系统稳态误差
- 利用 I 调节器提高系统型别,改善系统跟踪信号的能力,消除或减小稳态误差,从而改善系统稳态性能
- D 调节器只影响系统暂态性能,降低超调量,改善动态性能
- 高频部分微分导致幅值增大,抗干扰能力降低