过程控制系统
概念
定义
- 以温度、压力、流量、液位和成分等工艺参数作为被控量的自动控制
控制仪表
- 接收检测仪表的测量信号,控制生产过程正常进展的仪表
- 实现某一物理参数的自动控制需要以下装置:
- 反应被控参数变化的传感器
- 将测量信号标准化的变送器
- 设定被控参数正常值的定值器
- 比较被控参数变化并进行控制运算的控制器
- 实现控制命令的执行器及改变调节参数的控制阀
过程控制系统组成
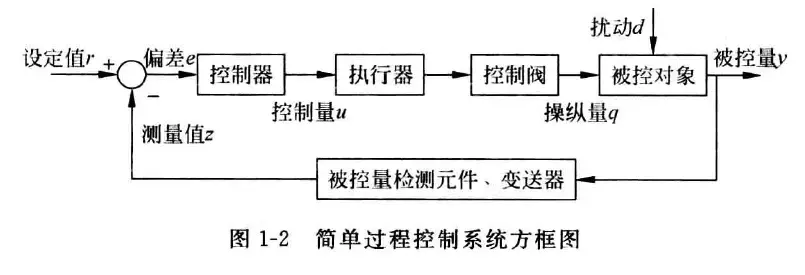
- 被控对象:简称对象,也称被控过程,其中所有需要进行自动控制的参数,成为被控量或被控参数。被控量往往是被控对象的输出量。
- 检测元件和变送器:由传感器检测被控参数的变化,当其输出不是电学量或是电学量但非标准信号时,再通过变送器转化成标准信号。传感器或变送器输出的就是被控量的测定值。
- 控制器:偏差信号作用于控制器,产生控制信号,控制执行机构动作。
- 执行器:接收控制信号,直接推动被控对象,使控制量发生变化。
- 控制阀:通过电或者气动驱动器驱动控制阀门,以改变输入对象的操作量,使被控量收到控制。
- 干扰:对系统施加控制作用,使得被控量产生任何变化的作用量均称作干扰或扰动。分为外干扰和内干扰。
- 控制参数:即调节介质,如储水槽液位控制系统的给水量。
- 测量值:被控量经过检测变送后的值。
- 偏差量:被控量的给定值和实际值之差,但通常把给定值和测量值之差称作偏差。
过程控制系统类型
反馈控制系统
- 偏差是控制的依据,控制系统要达到减小或消除误差的目的
- 被控量反馈到系统输入端,使得系统形成一个闭合回路,故也称为闭环系统
- 反馈信号可能有多个
前馈控制系统
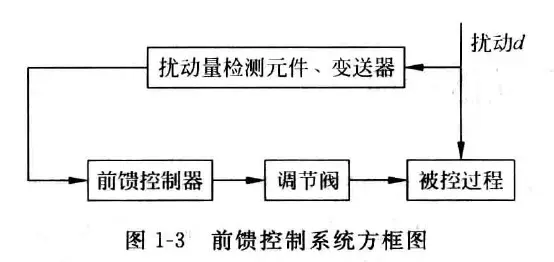
- 扰动是控制的依据
- 没有被控量的反馈信息,因此它是开环系统
- 前馈控制可以及时消除扰动对被控量的影响,但是开环系统无法检查控制效果,所以生产中不能单独使用
前馈控制的应用场合
- 扰动必须是可测的(不然怎么控制?)
- 必须是比较显著和频繁的扰动,否则没必要
- 存在对被控参数影响较大且不易直接控制的扰动
复合控制系统

- 能及时迅速克服主要扰动对被控量的影响
- 能检查控制的效果
- 大大提高系统控制质量
按定值信号的特点分
- 定值控制系统
- 设定值是固定不变的闭环控制系统
- 可克服扰动的影响,使被控量保持在工艺要求的数值
- 随动控制系统
- 设定值是一个未知的变化量的闭环控制系统
- 可以一定的精度跟随设定值的变化而变化
- 顺序控制系统
- 设定值是按一定的时间程序变化的
- 可以一定的精度跟随设定值的变化而变化
过程控制系统的特点
- 控制方案的多样性
- 对象存在滞后:被控参数往往不能立即反映出来
- 对象存在非线性:对象特性往往是随负荷而变的,不同负荷下的动态特性有明显的差别
- 控制系统比较复杂:过程控制涉猎范围广,工作机理复杂,难以求出精确的数学模型
被控对象动态特性的特点
- 单调不震荡(像二阶系统过阻尼阶跃响应)
- 具有延迟性和大的时间常数
- 具有纯时间滞后
- 具有自平衡和非自平衡性(自衡、无自衡)
- 非线性
典型被控过程
- 纯滞后过程:输入量改变后,输出量不会立即改变,而是要经过一段时间才反映出来
- 纯滞后时间:输入量变化后,看不到系统对其作出响应的这段时间
- 自衡:输入发生变化时,无需外加任何控制作用,系统能自发趋于新平衡态
- 无自衡:输入变化后,过程无法自发趋于新平衡态,如单容过程(也有自衡的)、多容过程
-
- 典型数学模型:
- 一阶惯性环节
- 二阶惯性环节
- 一阶惯性环节+纯滞后
- 二阶惯性环节+纯滞后
- 一阶惯性环节
- 典型数学模型:
过控性能指标
- 稳态或静态:被控量不再随时间变化的平衡态
- 动态或瞬态:系统未处于平衡态
- 控制过程就是克服和消除干扰的过程,一个控制过程的优劣,在于收到外来扰动或给定值发生变化后,经过控制器的作用,能否平稳、迅速、准确地回复(或趋近)到给定值
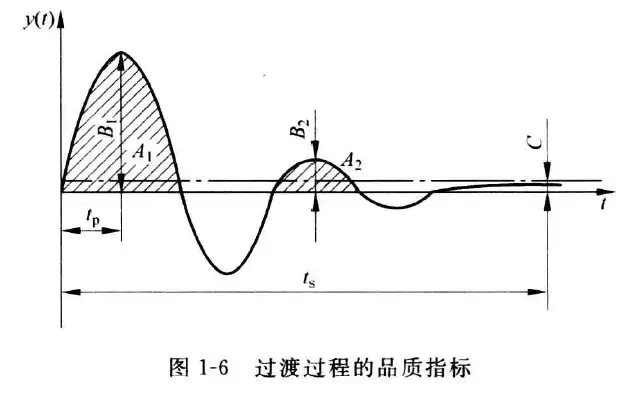
调节时间
- 调节时间、过渡过程时间
- 表示过程控制系统过渡过程的快慢,是衡量快速性的指标
- 和自控相同
余差
- 余差、静态偏差
- 一般要求余差不超过预定值或为 0
- 其实就是自控的稳态误差
衰减比、衰减率
-
衰减比
:相邻的同向波峰值之比 - 衰减比越大系统越稳定
- 适宜的值:
- 随动系统
- 定值系统
- 随动系统
-
衰减率
:每经过一个周期,波动峰值衰减的百分数 - 一般取值:
- 随动系统
,对应 - 定值系统
,对应
- 随动系统
最大偏差
- 最大偏差
- 指被控参数第一个波的峰值与给定值的差
- 超调量
- 不允许最大偏差大,持续时间长
A 和 B 的区别
- 最大偏差
- 波峰